Výpočetní tomografie (Computed Tomography – CT) je pro širokou veřejnost poměrně známou metodou z oboru lékařství, kde nachází uplatnění v oblasti diagnostiky. Lékařům výpočetní tomografie (dále jen CT) umožňuje zobrazit v řezech tělo pacienta a přesněji stanovit diagnózu. Od 70.let minulého století, kdy CT vstoupila do medicinské praxe, došlo k rapidnímu rozvoji výpočetní technologie a jejímu zpřístupnění pro ostatní obory vědy a průmyslu. Zde se objevuje CT jako průmyslová tomografie nebo CT skenování a patří dnes již mezi nepostradatelnou metodu nedestruktivního testování a kontroly kvality.

Lékařské CT a jeho dnes běžně dostupné kancelářské modifikace pro průmyslové a vědecké účely.
Tomografie znamená v překladu zobrazení v řezech (řec. tome-řez, grafein-psát). Bez vnějšího zásahu nám tedy umožňuje doslova vidět dovnitř těla objektu, vzorku nebo 3D naskenovat opticky nepřístupný prostor. Jak je to možné?
CT využívá zdroj rentgenového záření a snímač k zachycení radiografických snímků. Takových, jaké znáte od lékaře při stanovení diagnózy např. fraktury končetiny. Tento princip zobrazení se nazývá radiografie a vzniká průchodem RTG záření vzorkem a zachycením jeho obrazu na stínítku zobrazovače. RTG záření má na rozdíl od světelného dostatečnou energii na to, aby prošlo bez odrazu skrz předmět. Útlum RTG záření roste s hustotou materiálu a tak na výsledném snímku vidíme tmavá a světlá místa (podle hustoty materiálu v dráze paprsku). RTG paprsky jsou v detektoru převedeny na viditelné záření a digitalizovány. Každému pixelu na je podle útlumu přiřazena hodnota odstínu šedi v dané bitové hloubce.
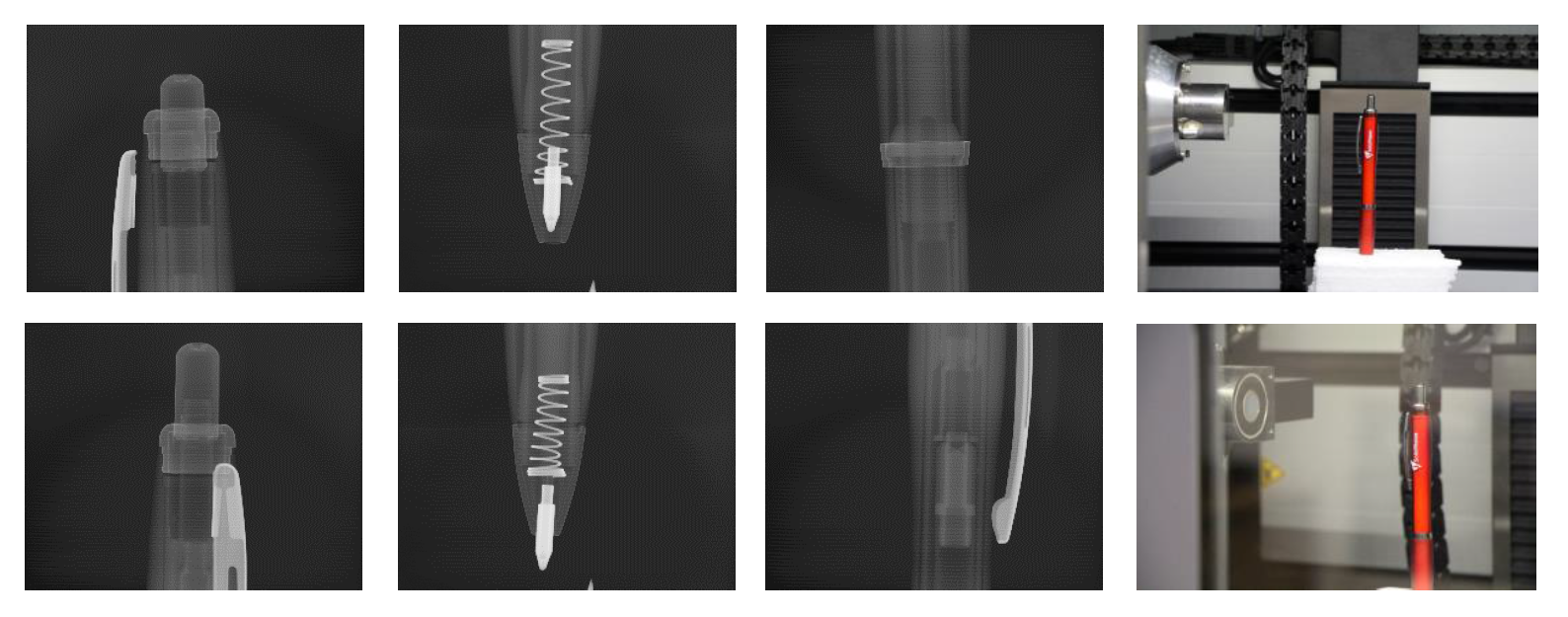
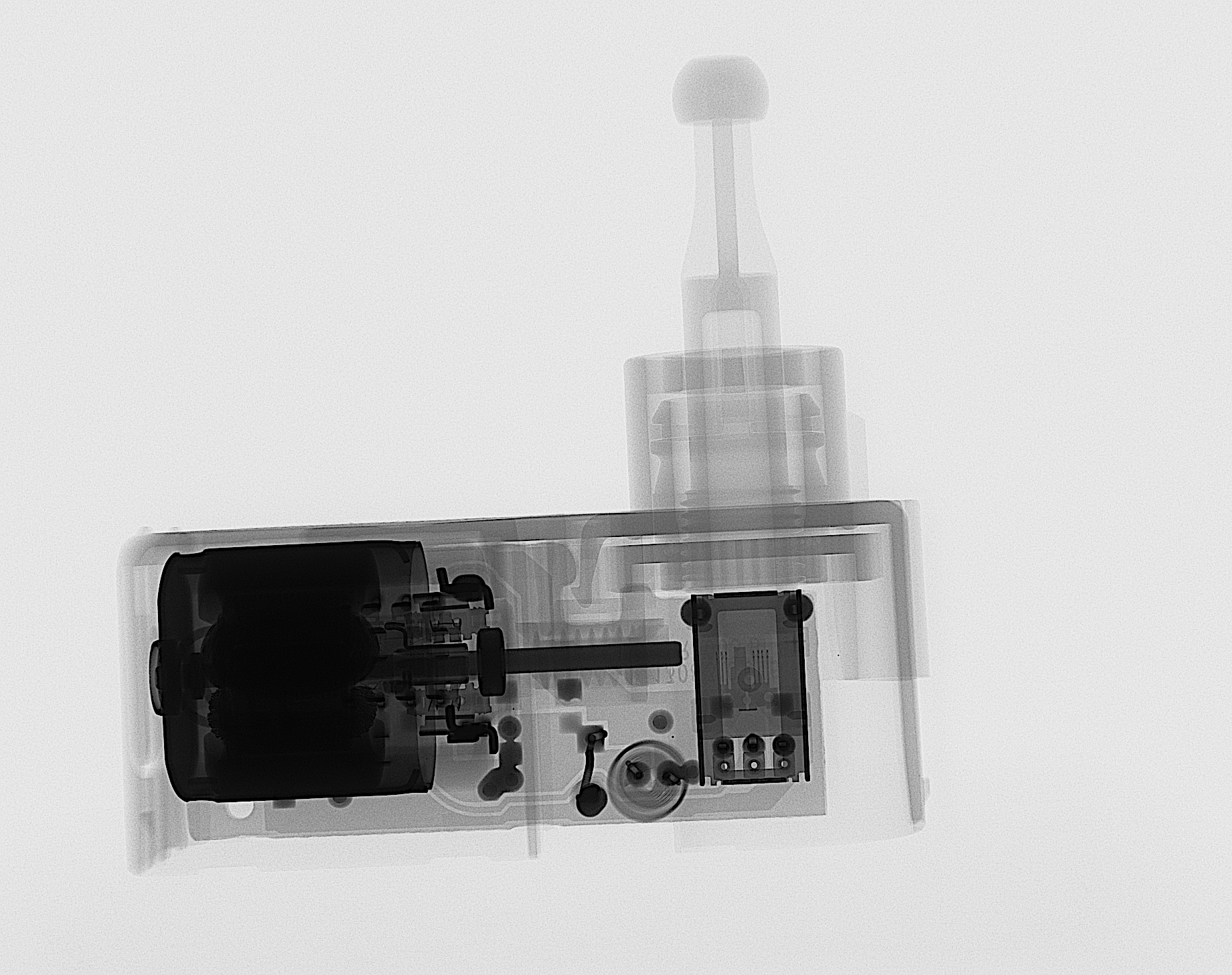
V této první fázi CT, radiografickém zobrazení, můžeme tento jednoduchý princip zobrazení využít k inspekci vzorku, sestav, defektů ale i potravin apod. v reálném čase a odhalit hledané vady a defekty.
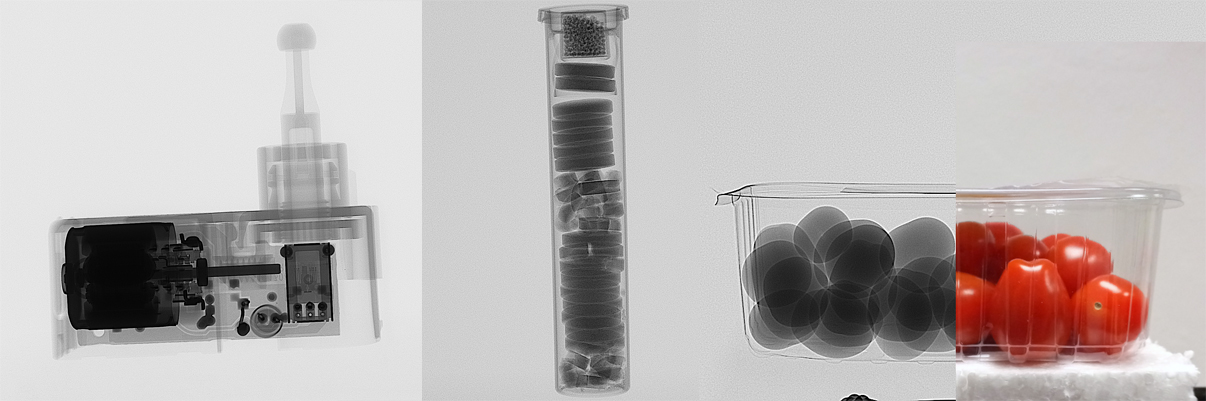
Již pouhým prosvícením objektu můžeme okamžitě získat cenné informace, které mohou vést k vyřešení daného problému
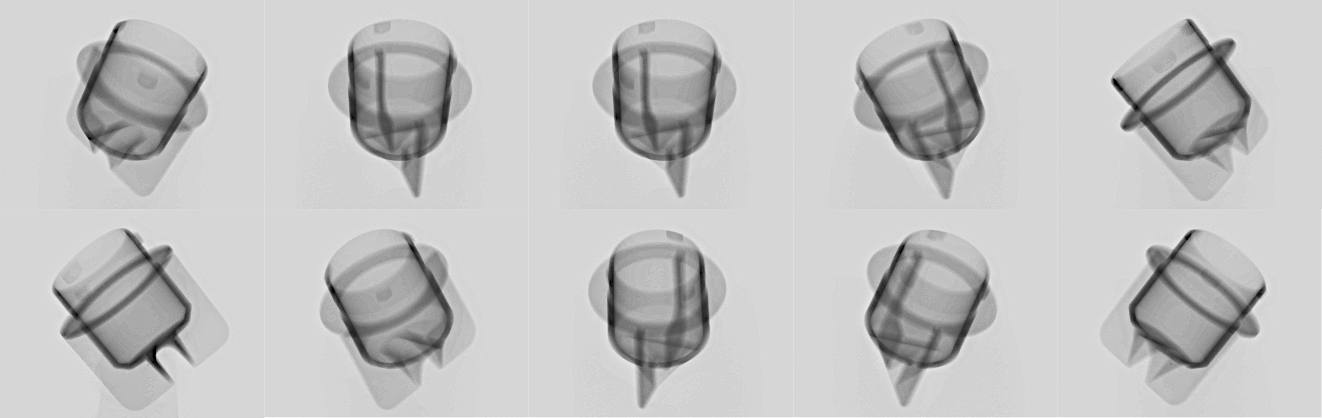
Umístíme-li vzorek na otočný stolek, můžeme pomocí radiografie získat soubor 2D snímků objektů v jeho 360° rotaci. Z těch je možné posléze zrekonstruovat výsledný 3D model. Pro dobrý výsledek je nutné pořídit stovky a někdy až tisíce takových snímků. Podmínka rotace vzorku ve stíněné inspekční komoře tomografu do značné míry určuje maximální velikost skenovaného objektu, stejně tak jako výkon zdroje RTG (rentgenky) musí být dostatečný na prozáření vzorku a získání kvalitních snímků.
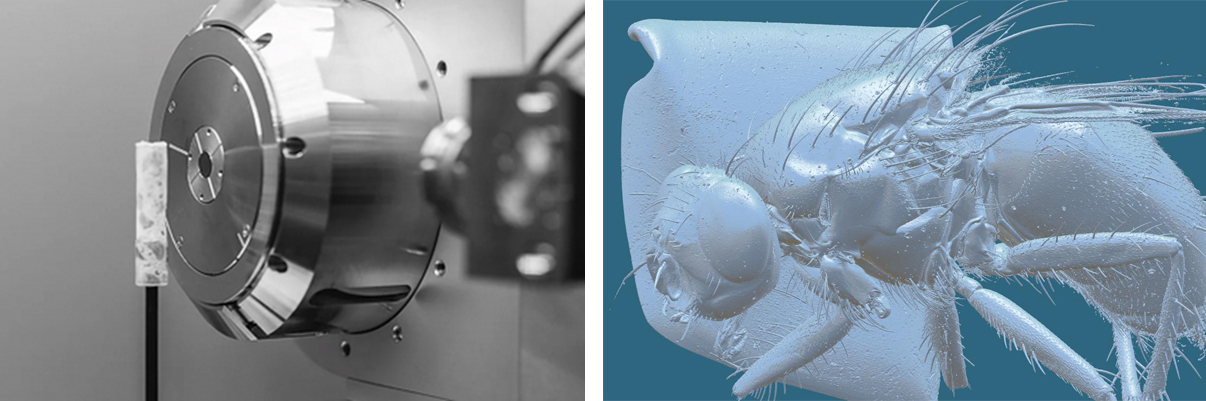
Inspekční komora malého tomografu RTG zdrojem (1), vzorkem (3) na otočném stolku (2) a snímačem/detektorem (4). Soubor radiografických snímků pro proces rekonstrukce filtrovanou zpětnou projekcí.
Stínový obraz na detektoru je zobrazen s příslušným zvětšením, které určuje ohnisková vzdálenost objektu od zdroje RTG. U velmi malých vzorků v těsné blízkosti rentgenky můžeme díky tomu dosáhnout i sub-mikronového rozlišení a skenovat velmi jemné, mikroskopické struktury a objekty.
Po první fázi získání souboru radiografických snímků objektu tzv. akvizici, následuje proces rekonstrukce při níž se z těchto snímků vytvoří 3D model. Při procesu rekonstrukce je klíčovým principem CT matematická aplikace tzv. filtrované zpětné projekce. Jedná se o inverzní algoritmus Radonovy transformace, který každou jednotlivou projekcí vyplní celý prostor a po jejich sečtení je odfiltrován šum.
Vlevo objekt s rotujícím zdrojem RTG záření a detektorem, na kterém vidíme měnící se hodnoty útlumu. Ten je znázorněn uprostřed tzv. sinogramem. V pravo je pomocí zpětné filtrované projekce (FBP) simultánně z daného sinogramu rekonstruován původní řez. Zdroj: Samuli Siltanen (University of Helsinki)
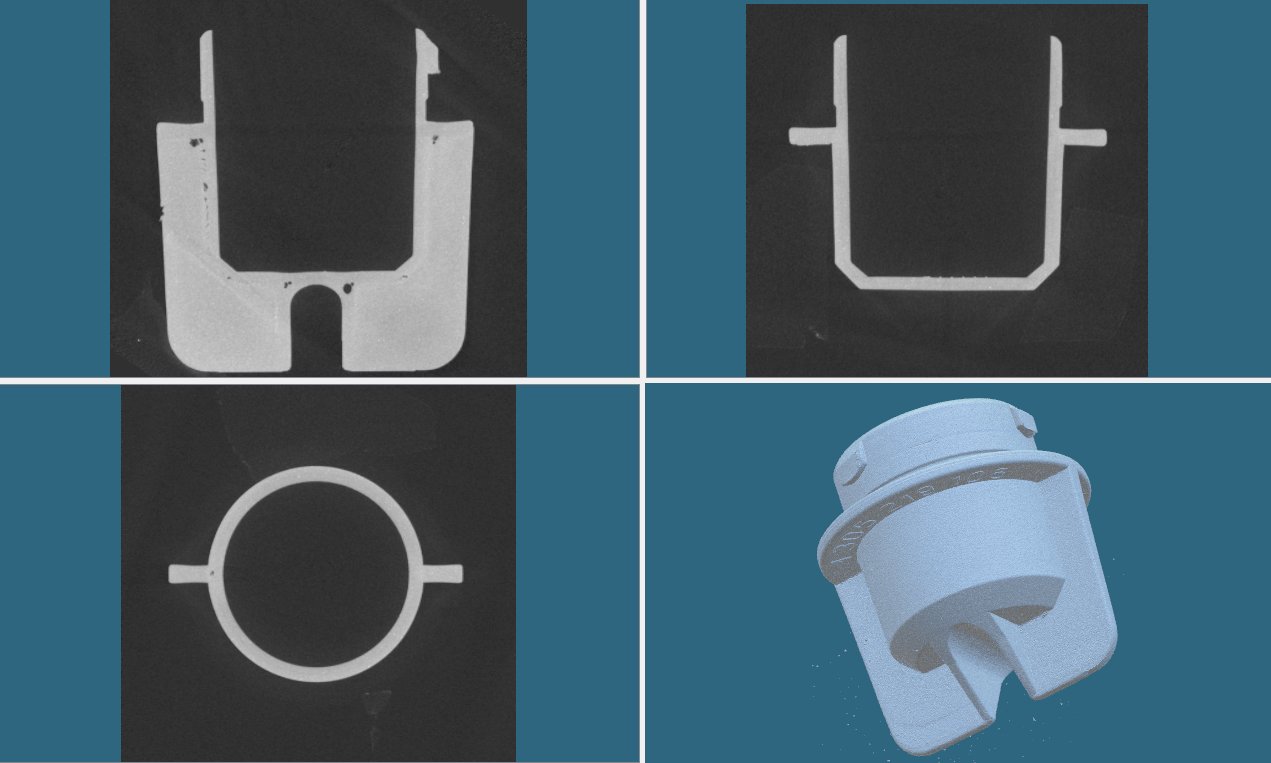
3D objekt po rekonstrukci zobrazený v řezech v jednotlivých osách
Po rekonstrukci tedy získáme 3D objekt s řezy v jednotlivých osách X, Y, Z daného souřadného systému. Na rozdíl od ostatních optických metod 3D skenování, kde výstupem je většinou polygonová síť (.stl, .obj), tedy pouze informace o viditelném povrchu, u CT skenování je objekt zobrazován pomocí tzv. voxelů (objemových elementů). Každému voxelu je podle útlumu RTG záření přiřazena hodnota odstínu šedi v dané bitové hloubce. Hranice (objekt/prostor), tedy povrch rekonstruovaného modelu určí nastavení úrovně prahu (treshhold) pro proces determinace povrchu. Nejjednodušším způsobem je využít střed mezi průměrnou hodnotou pozadí a materiálu (ISO50). Ta pak určí, co bude objekt a co prostor. (Nutno dodat, že v praxi používáme pokročilejší metody.) Nakonec získáme model s precizně zachycenou geometrií komplexního povrchu, ale ještě máme k dispozici celé tělo objektu složené z jednotlivých voxelů, z nichž každý nese svou informaci. Právě to, dělá z CT jeden z nejsilnějších nástrojů nedestruktivní analýzy a testování.
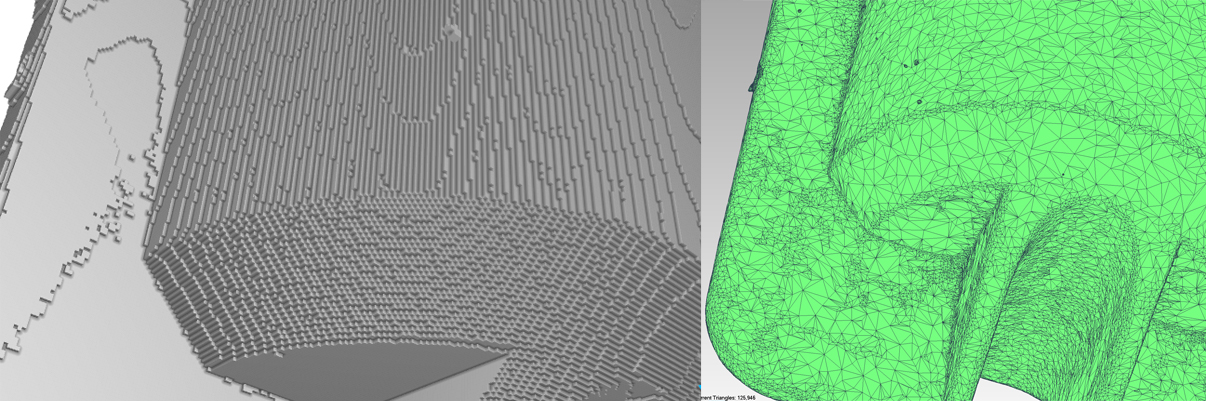
Ilustrační (zjednodušené) vizualizace rozdílné reprezentace pomocí voxelů a polygonové sítě. Vlevo objemový model z voxelů, vpravo model povrchu složený z trojúhelníkové sítě.

Výsledný povrch po pokročilé determinaci povrchu za použití hodnot okolních voxelů.
Využití CT jsou více méně shodné s aplikacemi laserového a optického skenování. Nachází tedy uplatnění hlavně při rozměrové kontrole, ale i třeba prototypingu a digitalizaci. U průmyslové výpočetní tomografie se však aplikační pole rozšiřuje o celou řadu oblastí, které vyplývají z využití voxelové reprezentace (zachycení vnitřní struktury) k následným analýzám a simulacím.
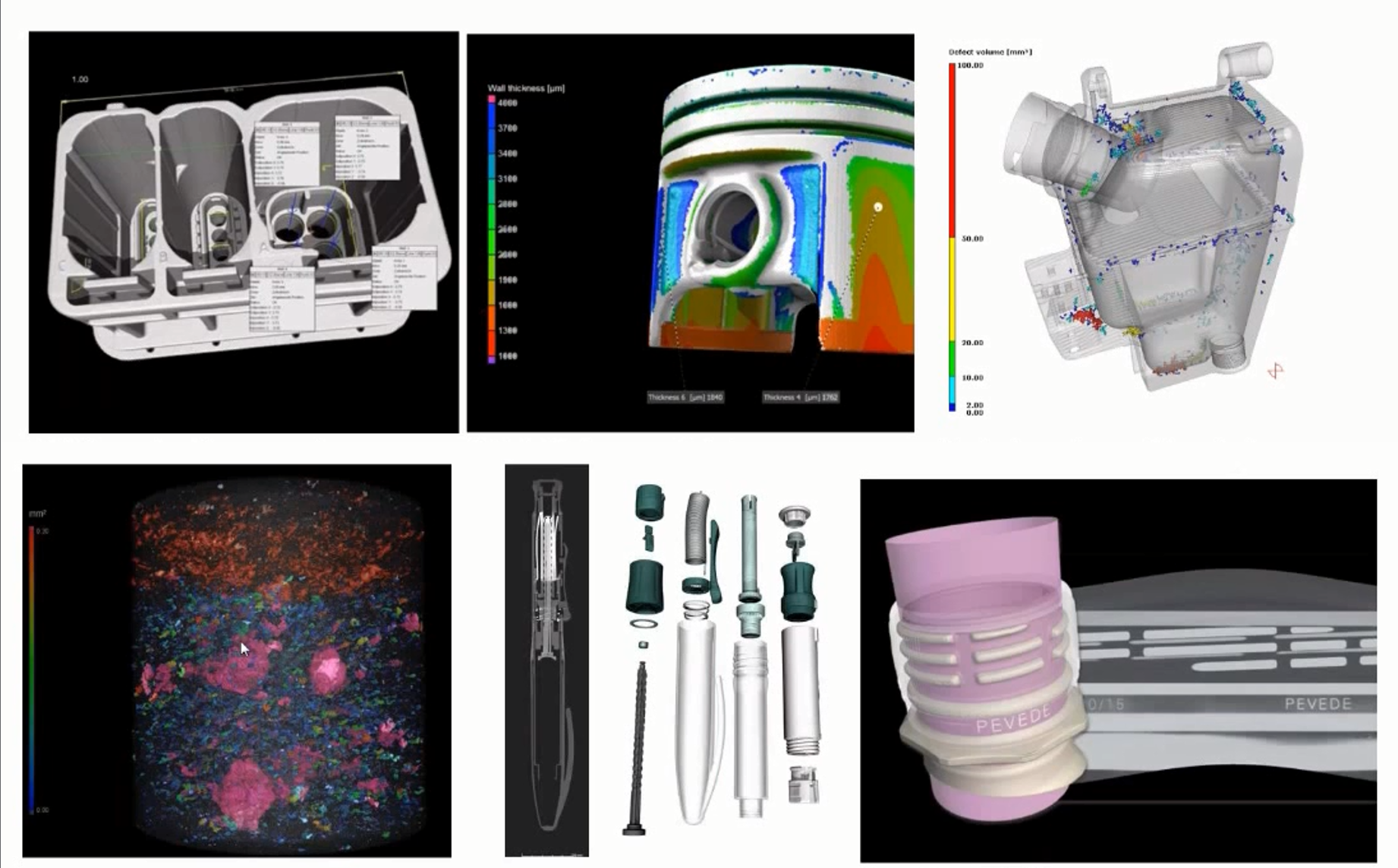
Takto získané výsledky lze použít k vyhodnocení (vizualizace, barevná mapa, histogram, statistické vyhodnocení .. ) porozity/inkluzí, porovnání s CAD modelem, tloušťky stěn, orientace vláken, struktury porézních materiálů, k simulacím pevnosti a proudění, ale i k působivým vizualizacím pomocí segmentace.
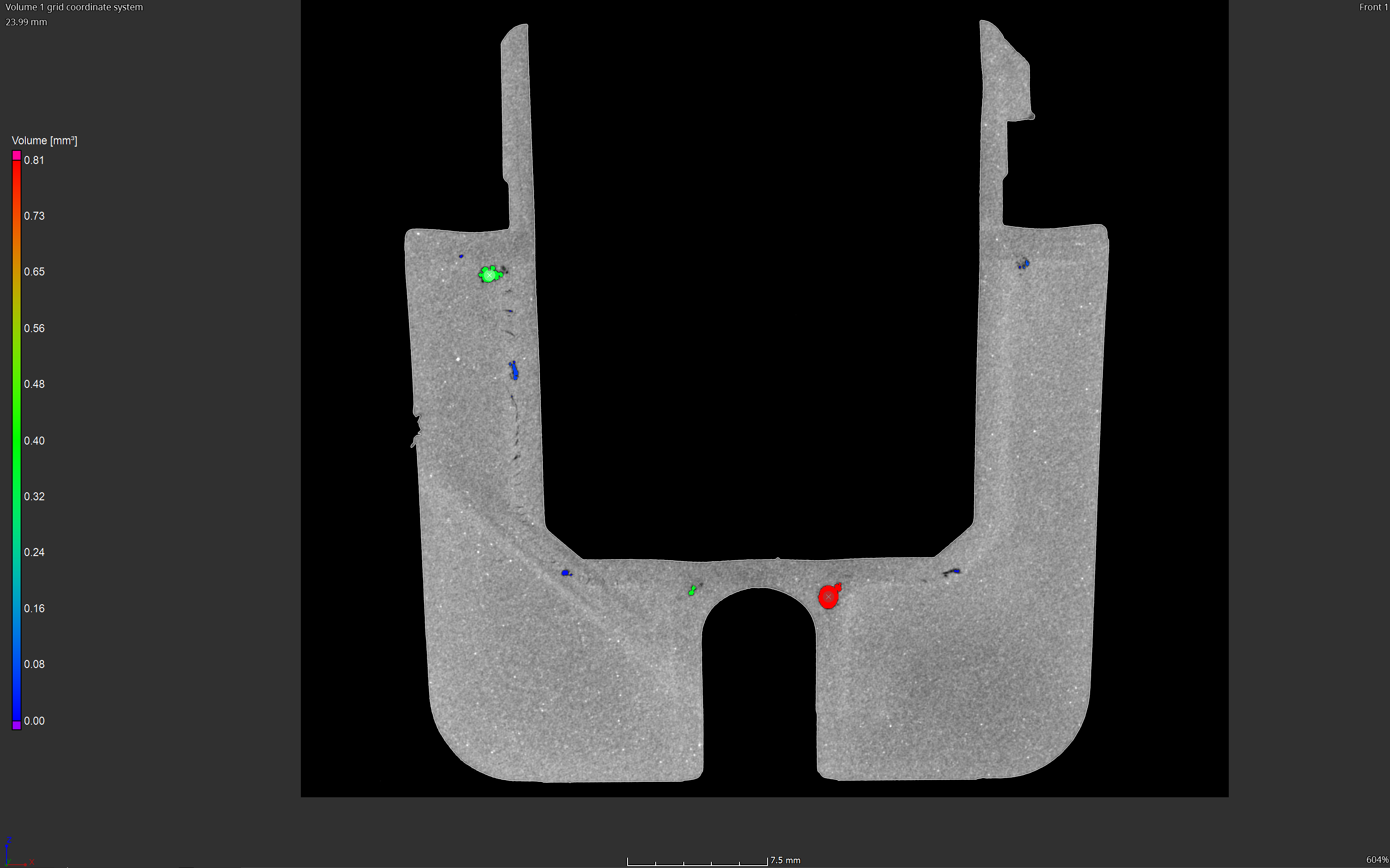
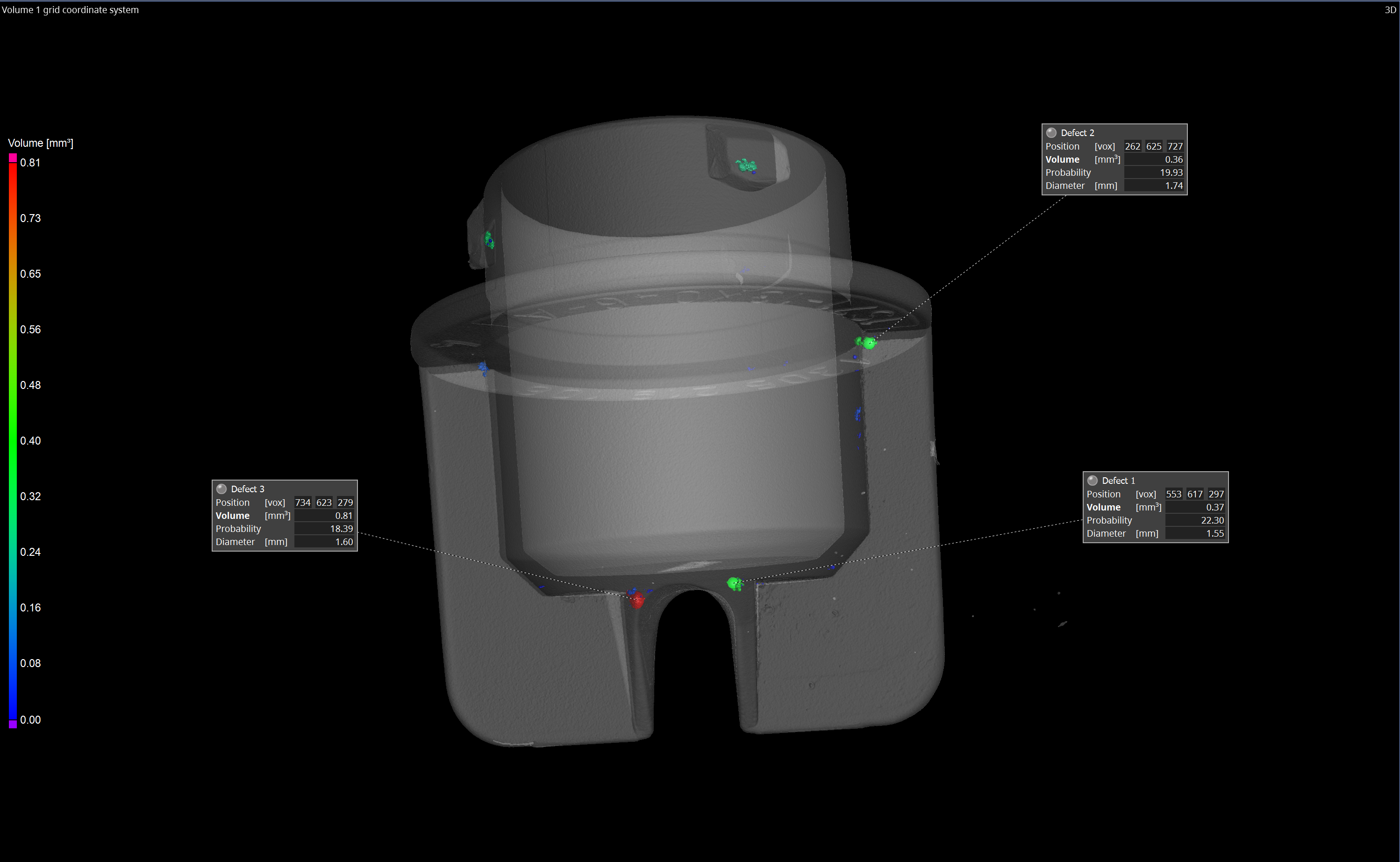
Detekce 3 největších pórů v programu VG Studio MAX
Výpočetní tomografie je efektivní nástroj pro kontrolu, vývoj a výzkum například v automobilovém a leteckém průmyslu, aditivní výrobě a různých oblastech strojního inženýrství, kde potřebujeme využít nedestruktivní, neinvazivní metody analýzy a kontroly kvality. Z oblastí vědeckých disciplín se jedná o využití výhod mikrotomografie také např. v biologii, geologii, archeologii nebo paleontologii. V řadě vědeckých experimentů se také využívá skenování in situ, tedy snímání vzorku za specifických fyzikálních podmínek (teplota, tlak, vakuum apod..) v tomu uzpůsobených přípravcích. Jak je z výše uvedeného zřejmé, možnosti výpočetní tomografie jsou obrovské. Můžeme také předpokládat, že s vývojem nových typů snímačů a postupující automatizací se bude průmyslová CT objevovat v nejrůznějších aplikacích stále častěji.